Экспериментальные испытания роботов Arduino
1. Дизайн темы
Интеграция знаний о программном и аппаратном обеспечении, которые вы узнаете в своих курсах, о интеллектуальных устройствах управления Arduino, которые вы делаете, и практических проблемах, которые решаются в рамках проекта Microbit Smart Motors
Проблемы и функции. Роботизированный автомобильный комплект
2.Основные элементы
Дизайн проекта: четкое описание идей проектирования, условий аппаратного и программного обеспечения и осуществимости достижения целей проектирования.
Аппаратный дизайн: обзор аппаратных функций и структуры, описание основных модулей, схемы аппаратного дизайна, описание функций схемы
Программное обеспечение: обзор функционального проектирования программного обеспечения, блок - схема, функциональное описание блок - схемы, исходный код основной программы и программного модуля
Процесс отладки: построение схемы, экспериментальная отладка, функциональное тестирование и описание результатов
Резюме и размышления: степень достижения целей, проблем и решений проектных задач в эксперименте, размышления и улучшения
Аппаратные модули III
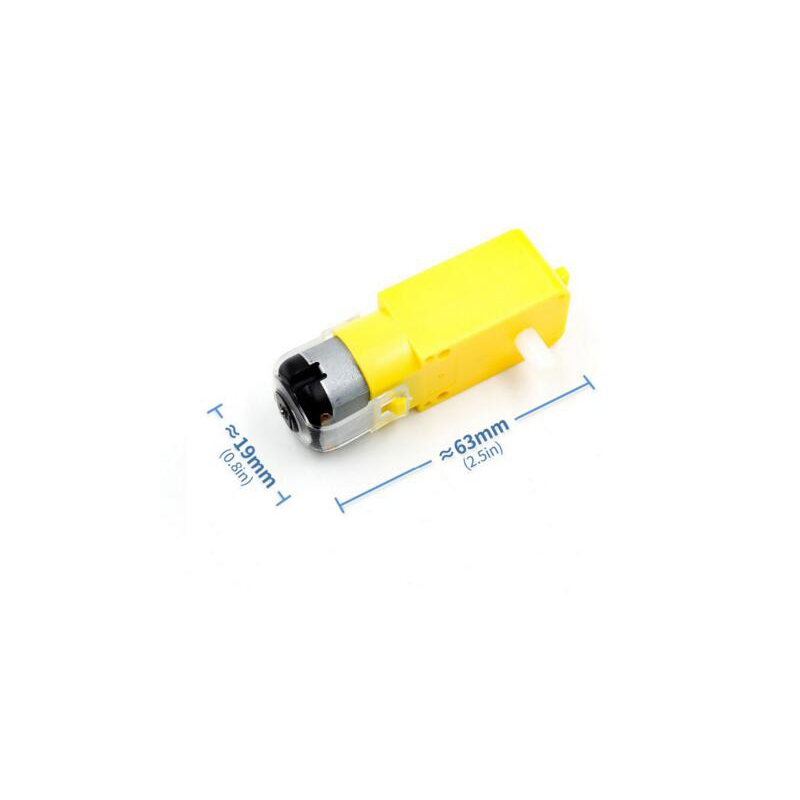
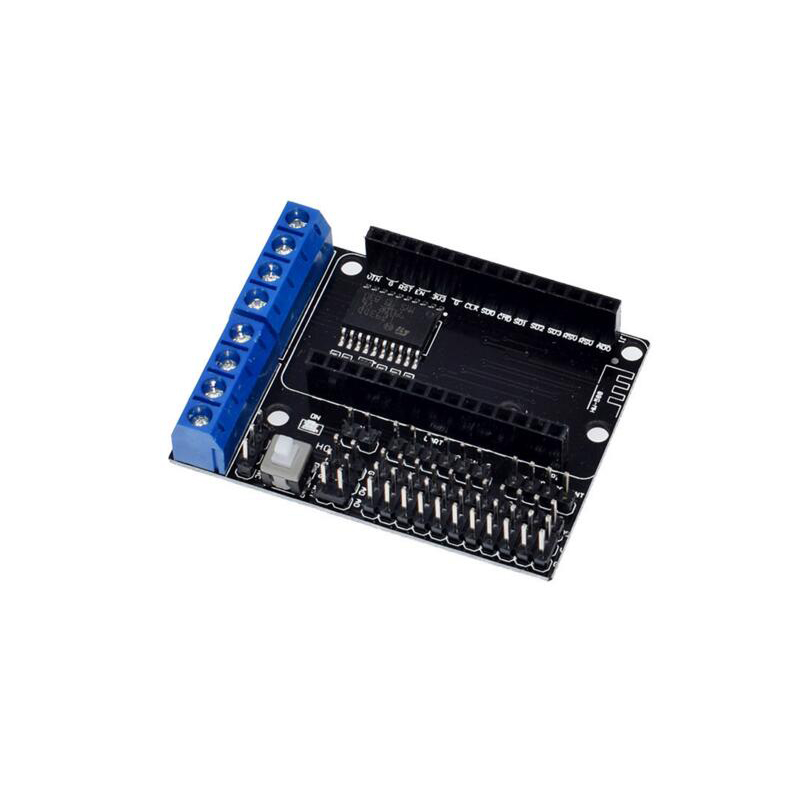
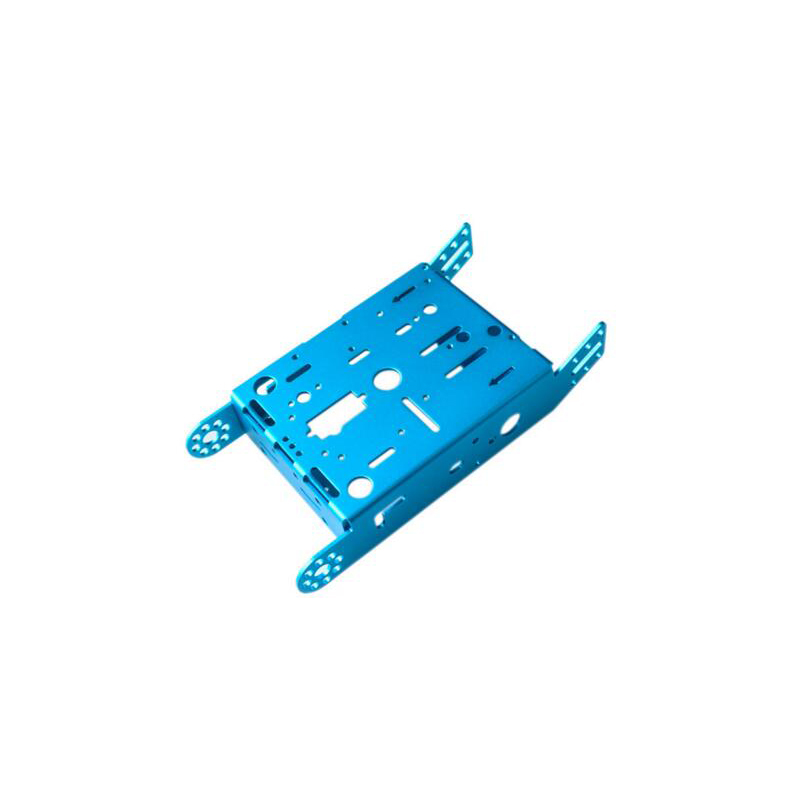
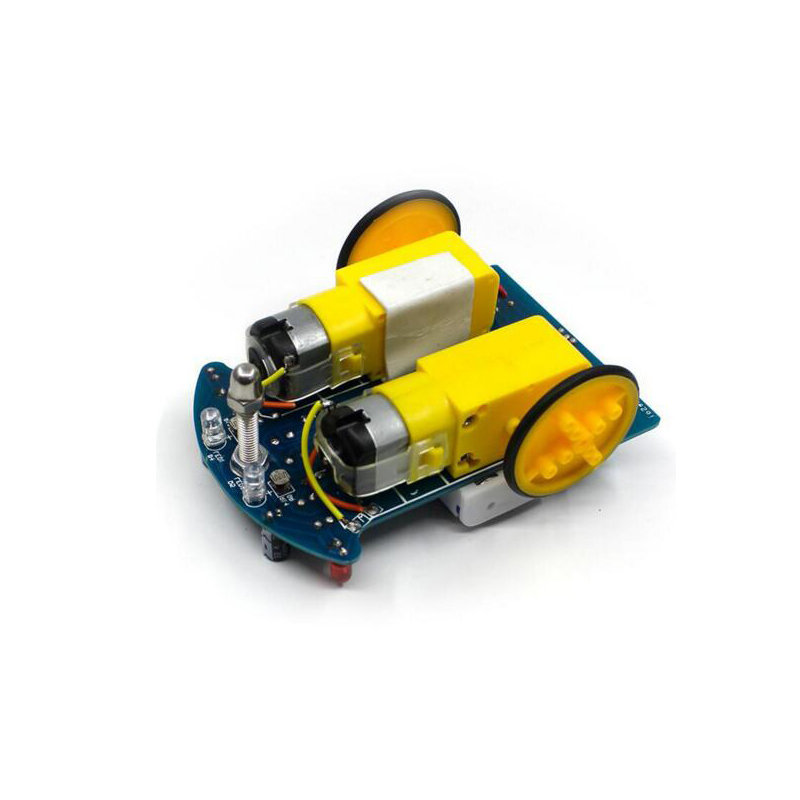
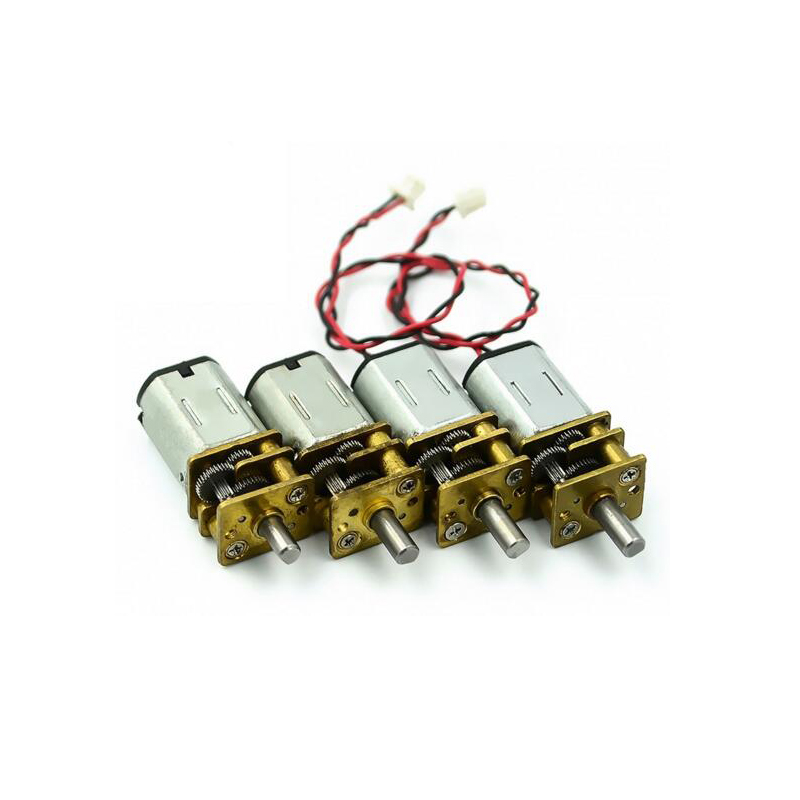
В основном: интеллектуальное автомобильное шасси, инфракрасный датчик дистанционного управления, двухосный качалка PS / 3, двухмоторный приводной модуль L298N, двигатель постоянного тока и двигатель
Группа бассейнов, ультразвуковые датчики, инфракрасные датчики слежения, инфракрасные датчики предотвращения препятствий, переключатели предотвращения столкновений
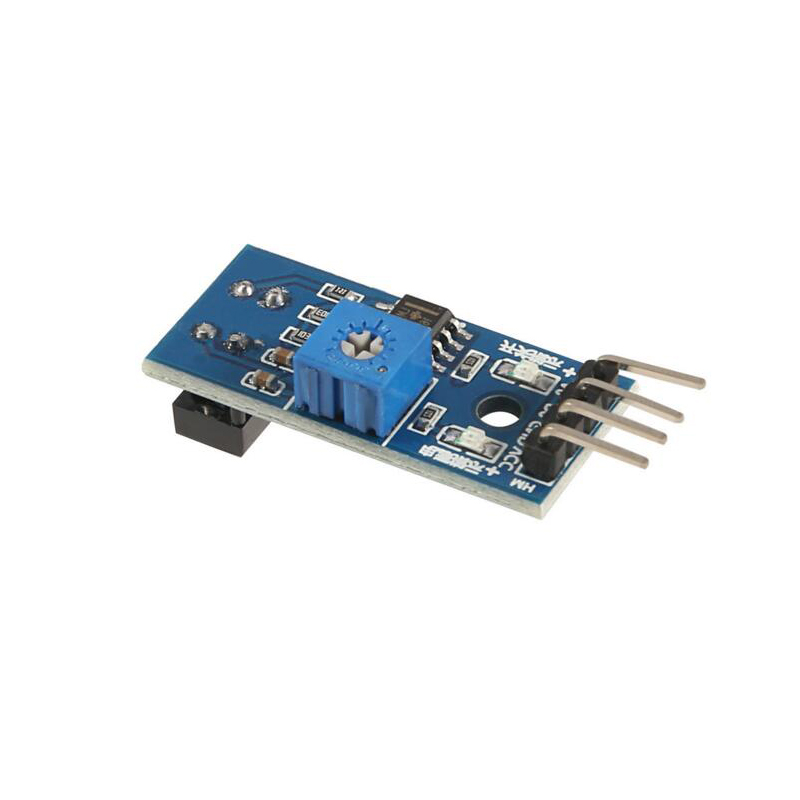
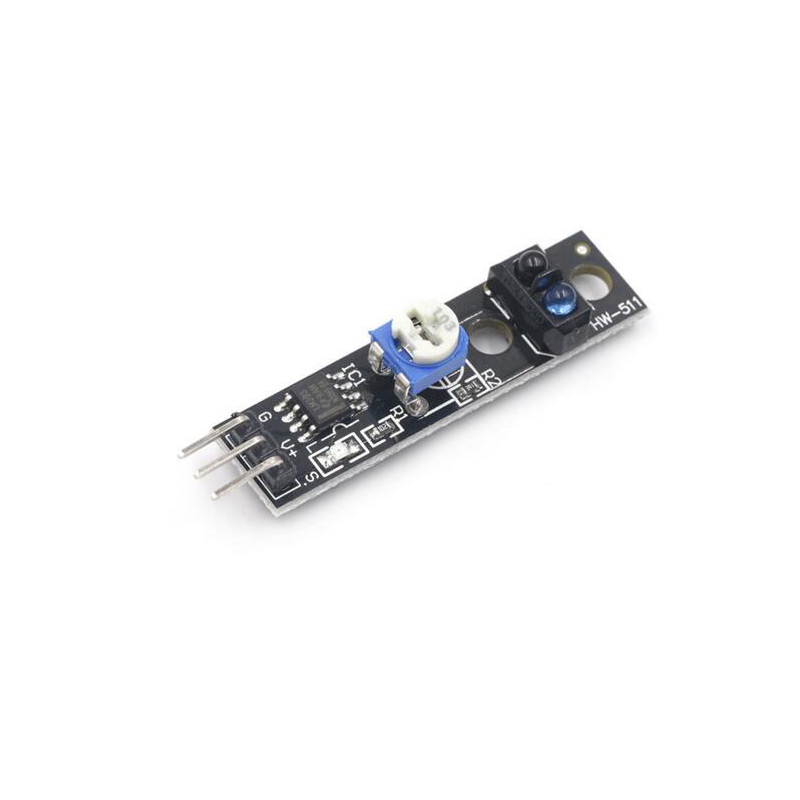
инфракрасный датчик слежения
Инфракрасный датчик слежения состоит из пары инфракрасных передающих и приемных труб. Запускающая трубка излучает инфракрасные лучи определенной частоты. Когда направление обнаружения сталкивается с препятствием, инфракрасный свет отражается и принимается приемной трубкой. После обработки схемы компаратора выходной порт сигнала выводит цифровой сигнал. Расстояние обнаружения может регулироваться ручкой потенциометра, диапазон эффективного расстояния 2 - 30 см, рабочее напряжение 3,3 - 5В. Инфракрасные датчики слежения используют инфракрасные характеристики различной интенсивности отражения на поверхности объектов разных цветов, чтобы определить, движется ли автомобиль по черной (или белой) орбите в зависимости от интенсивности инфракрасного отраженного сигнала, полученного инфракрасным приемником, и тем самым определить положение движения автомобиля. Роботизированный автомобильный комплект
схема инфракрасного датчика слежения
принцип инфракрасного сопровождения патрульных машин
Отслеживание автомобиля - это движение автомобиля по черной линии на белом полу, как правило, с использованием инфракрасного метода обнаружения. Во время движения автомобиль постоянно излучает инфракрасный свет на землю. При столкновении с белой землей происходит сильное диффузное отражение, и отраженный свет принимается инфракрасной приемной трубкой; При столкновении с черной землей он будет сильно поглощен, а инфракрасная приемная головка не сможет получать инфракрасный свет или будет слабо принята. Главная панель Arduino определяет местоположение черной линии и путь движения автомобиля на основе отраженного инфракрасного света.
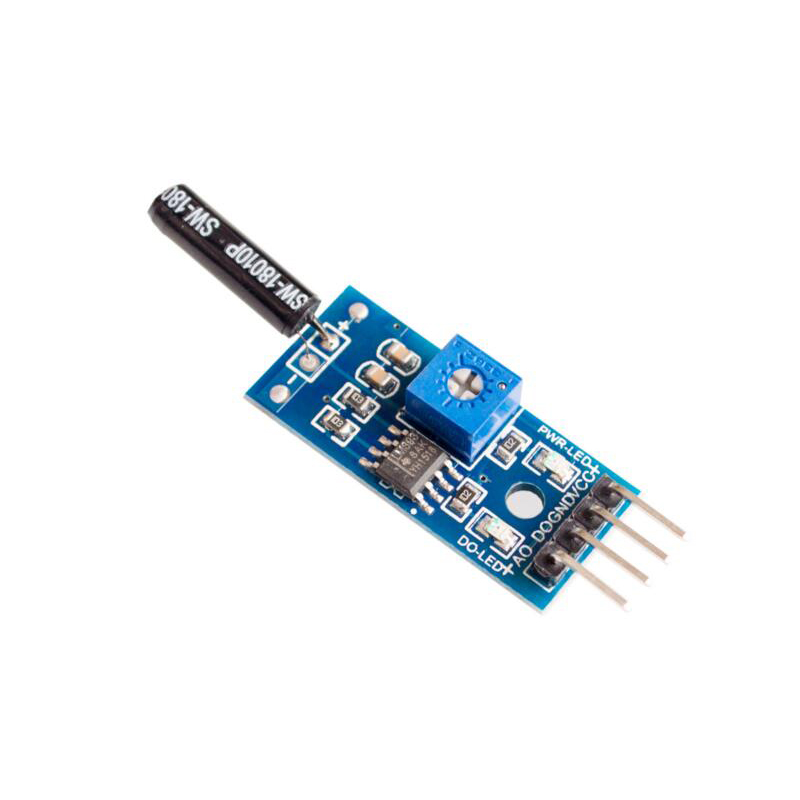
инфракрасный датчик предотвращения препятствий
Инфракрасный датчик предотвращения препятствий состоит из пары инфракрасных передающих и приемных труб. Запускающая трубка активно излучает инфракрасные лучи с определенной частотой. Когда направление обнаружения сталкивается с препятствием, инфракрасное излучение отражается обратно и принимается приемной трубкой. После обработки схемы компаратора выходной порт сигнала выводит цифровой сигнал. При обнаружении препятствий выходной порт сигнала непрерывно выводит низкоуровневый сигнал. Расстояние обнаружения может быть отрегулировано ручкой потенциометра. Эффективное расстояние составляет 2 - 30 см, рабочее напряжение 3,3 - 5В.
Принцип инфракрасного слежения за патрульным автомобилем. Отслеживание патрульного автомобиля - это движение автомобиля вперед по черной линии на белом полу, как правило, с использованием инфракрасного метода обнаружения. Во время движения автомобиль постоянно излучает инфракрасный свет на землю. При столкновении с белой землей происходит сильное диффузное отражение, и отраженный свет принимается инфракрасной приемной трубкой; При столкновении с черной землей он будет сильно поглощен, а инфракрасная приемная головка не сможет получать инфракрасный свет или будет слабо принята. Главная панель Arduino определяет местоположение черной линии и путь движения автомобиля на основе отраженного инфракрасного света. Умный автомобиль Arduino, роботизированный автомобиль Arduino
Интеллектуальные автомобильные ресурсы
Датчики интеллектуальных автомобилей обычно используют инфракрасные трубки, металлические переключатели, ультразвуковые дальномеры, датчики ускорения, датчики компаса, рулевое управление, двигатели постоянного тока, контроллеры L298N и т. Д. DIY Образовательный робот Интеллектуальный автомобильный комплект, Практический учебный комплект Интеллектуальный автомобильный сварочный комплект, Arduino Робот Образование DIY Умный автомобиль