Teste experimental do kit Arduino Smart Car Robot
1. Tema de design
Integre os conhecimentos de software e hardware aprendidos e dominados no curso, apresente o dispositivo de controle inteligente Arduino feito por você e os problemas práticos resolvidos pelo projeto, carro inteligente Microbit
Perguntas e funções. KIT DE CARRO ROBÔ
2. Conteúdo básico
Esquema de design do projeto: explique claramente as ideias de design, as condições de software e hardware e a viabilidade de realizar os objetivos do design.
Projeto de hardware: visão geral da função e estrutura do hardware, descrição da função do módulo principal, diagrama de circuito do projeto de hardware, descrição da função do circuito
Design de software: visão geral do design de funções de software, fluxograma do programa, descrição da função do fluxograma, código fonte do programa principal e módulo do programa
Processo de depuração: construção de circuito, depuração experimental, teste de função e descrição de resultados
Resumo e Reflexão: o grau de realização dos objetivos, problemas e soluções da tarefa de design no experimento, reflexão e melhoria
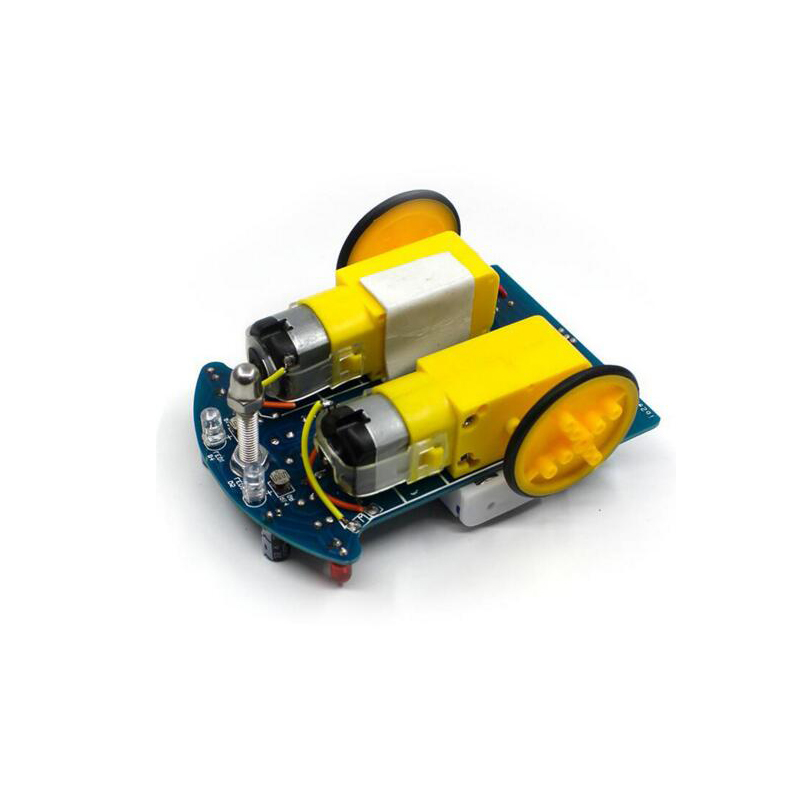
Módulo de hardware III
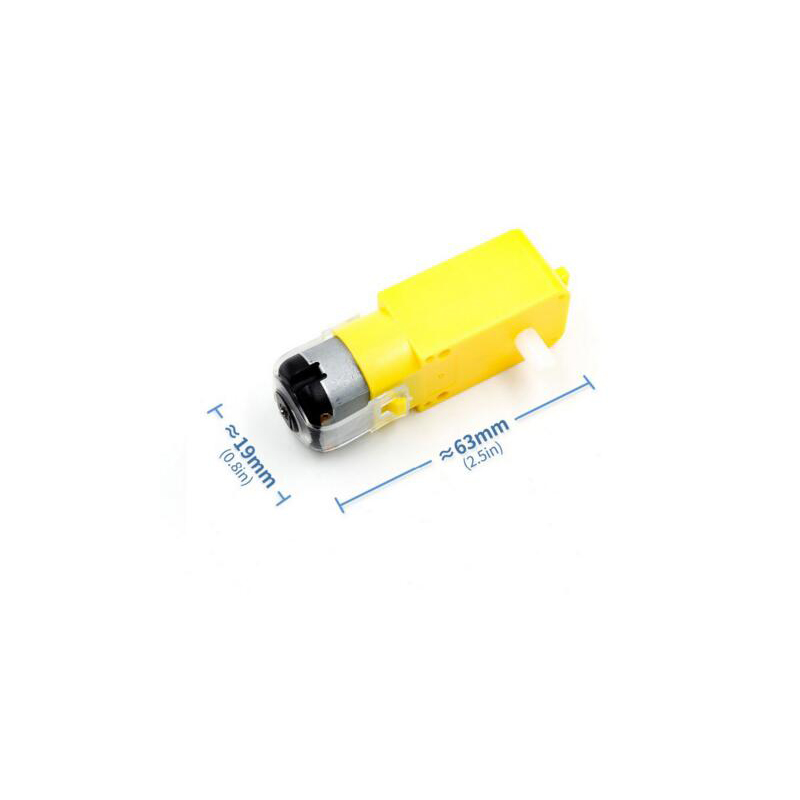
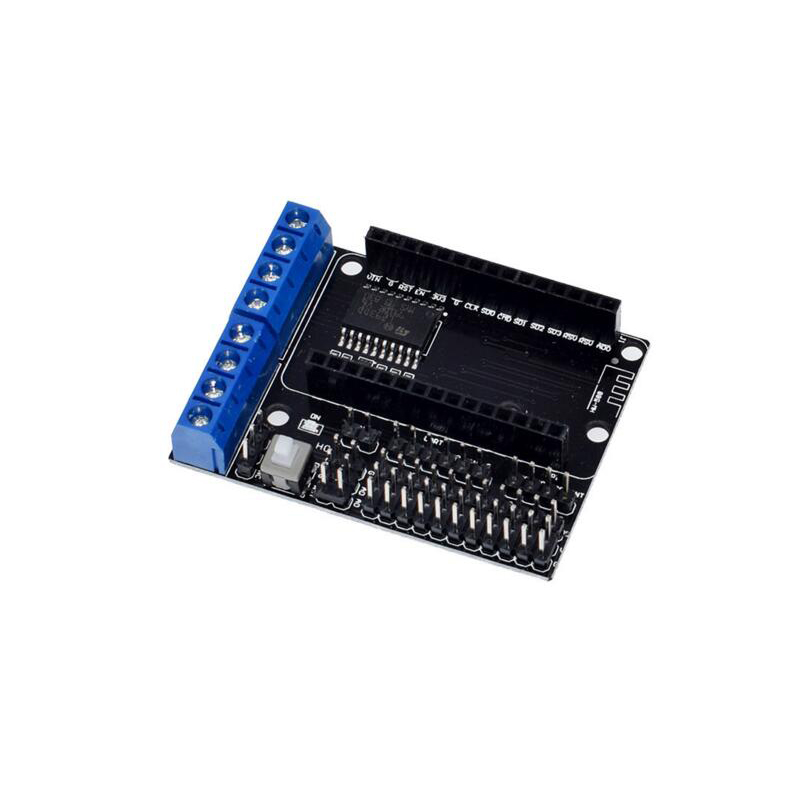
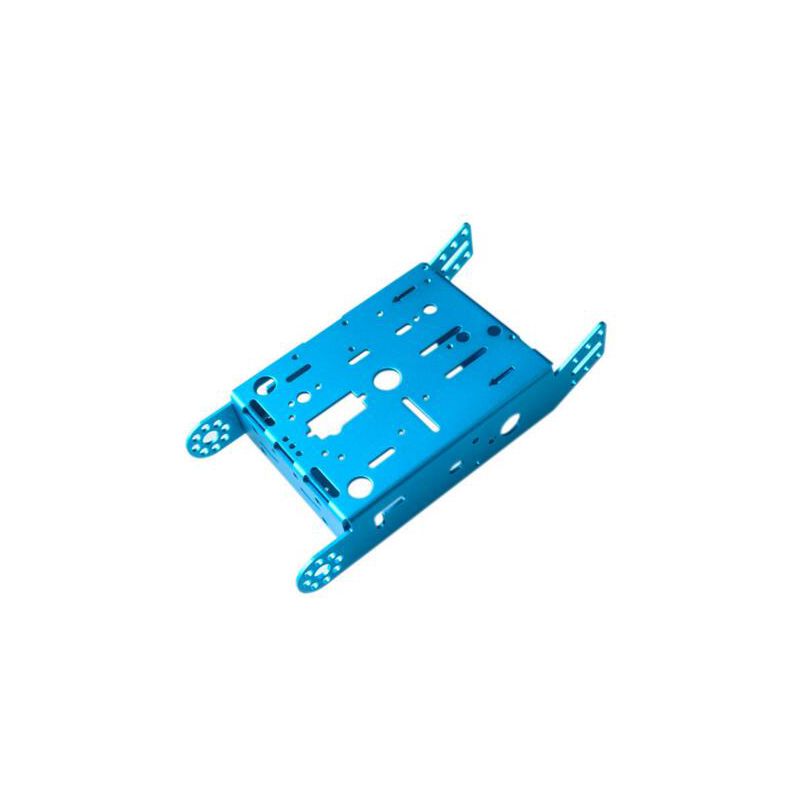
Inclui principalmente: chassi de carro inteligente, sensor de controle remoto infravermelho, balancim de eixo duplo PS / 3, módulo de acionamento de motor duplo L298N, motor DC e motor elétrico
Grupo de piscina, sensor ultrassônico, sensor de rastreamento infravermelho, sensor infravermelho para evitar obstáculos, interruptor anticolisão
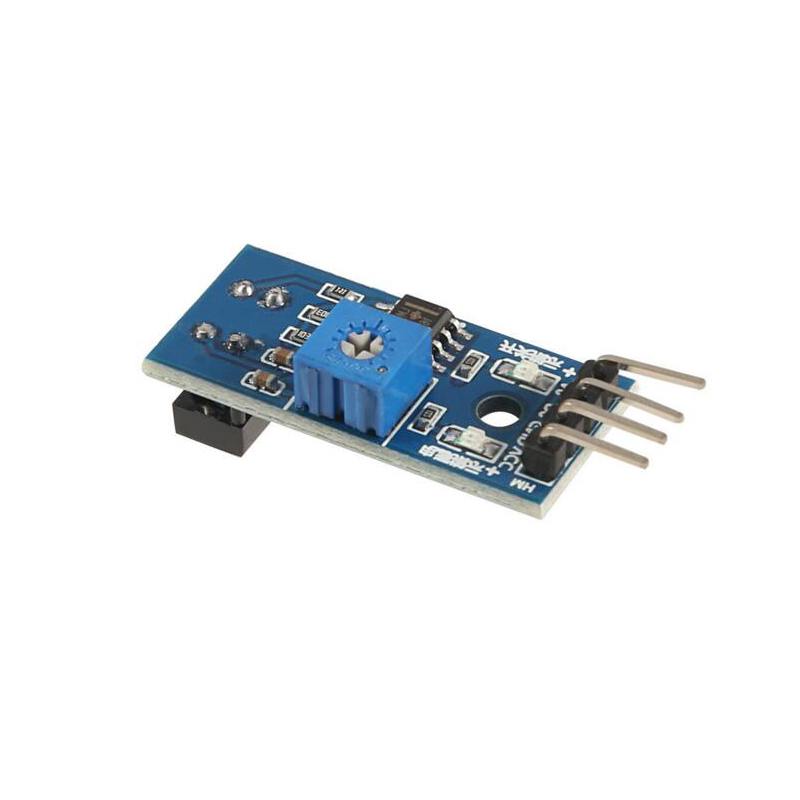
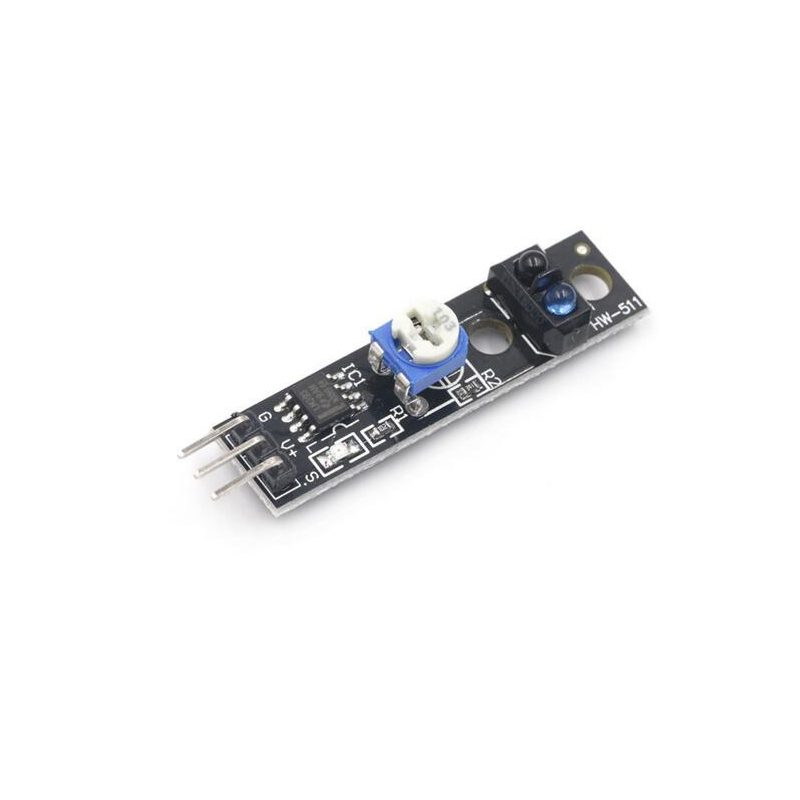
Sensor de rastreamento infravermelho
O sensor de rastreamento infravermelho é composto por um par de tubos de transmissão e recepção de infravermelho. O tubo transmissor emite infravermelho com uma certa frequência. Quando a direção de detecção encontra obstáculos, o infravermelho é refletido de volta e recebido pelo tubo receptor. Depois de ser processado pelo circuito comparador, a porta de saída de sinal emite um sinal digital. A distância de detecção pode ser ajustada através do botão do potenciômetro e a faixa de distância efetiva é de 2 a 30 cm. A tensão de trabalho é de 3,3 a 5 V. Usando as características de que o infravermelho tem intensidade de reflexão diferente na superfície de objetos com cores diferentes, o sensor de rastreamento infravermelho avalia se o carro está rodando na pista preta (ou branca) de acordo com a força do sinal de reflexão infravermelha recebido pelo receptor infravermelho. , de modo a julgar o estado da posição de funcionamento do carro. KIT DE CARRO ROBÔ
Diagrama esquemático do circuito do sensor de rastreamento infravermelho
Princípio de rastreamento infravermelho do carro patrulha
O rastreamento do carro consiste no movimento do carro ao longo da linha preta no chão branco, geralmente usando o método de detecção infravermelho. O carro emite continuamente luz infravermelha para o solo durante a condução. Ao encontrar o fundo branco, ocorre uma forte reflexão difusa e a luz refletida é recebida pelo tubo receptor infravermelho; Se encontrar um solo preto, será fortemente absorvido e a cabeça receptora infravermelha não poderá receber luz infravermelha ou será recebida fracamente. A placa de controle principal do Arduino determina a posição da linha preta e a rota de avanço do carrinho de acordo com a luz infravermelha refletida.
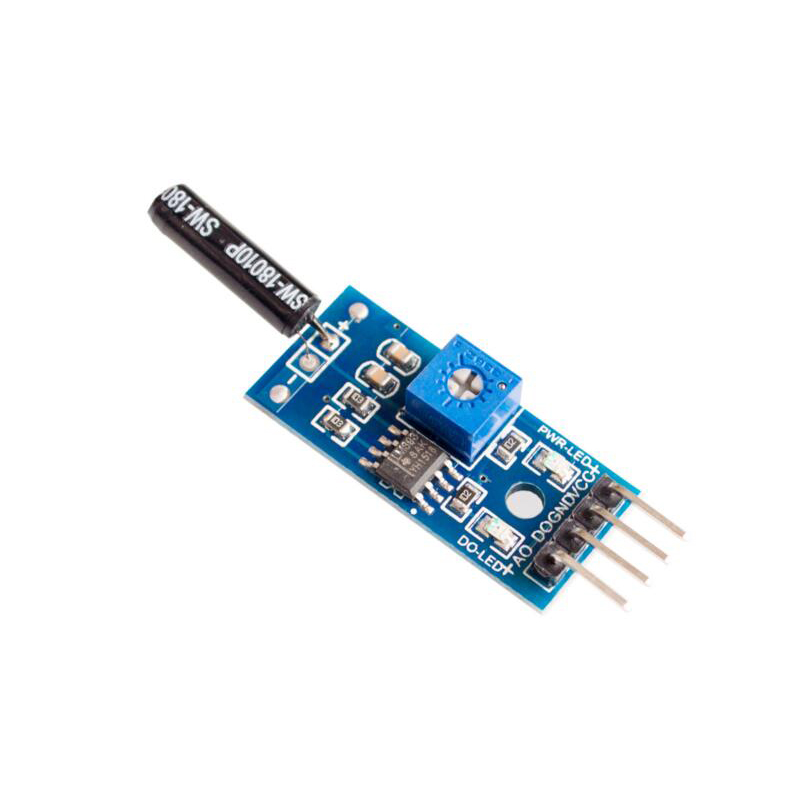
Sensor infravermelho para evitar obstáculos
O sensor infravermelho para evitar obstáculos é composto por um par de tubos de transmissão e recepção infravermelhos. O tubo transmissor emite infravermelho ativamente com uma certa frequência. Quando a direção de detecção encontra um obstáculo, o infravermelho é refletido de volta e recebido pelo tubo receptor. Depois de ser processado pelo circuito comparador, a porta de saída de sinal emite um sinal digital. Quando um obstáculo é detectado, a porta de saída de sinal emite continuamente um sinal de baixo nível. A distância de detecção pode ser ajustada através do botão do potenciômetro. A faixa de distância efetiva é de 2 a 30 cm e a tensão de trabalho é de 3,3 a 5 V.
O princípio de rastreamento infravermelho do rastreamento de carros de patrulha de linha é que o carro avança ao longo da linha preta no chão branco, geralmente usando o método de detecção infravermelho. O carro emite continuamente luz infravermelha para o solo durante a condução. Ao encontrar o fundo branco, ocorre uma forte reflexão difusa e a luz refletida é recebida pelo tubo receptor infravermelho; Se encontrar um solo preto, será fortemente absorvido e a cabeça receptora infravermelha não poderá receber luz infravermelha ou será recebida fracamente. A placa de controle principal do Arduino determina a posição da linha preta e a rota de avanço do carrinho de acordo com a luz infravermelha refletida. Carro inteligente habilitado para Arduino, carro inteligente robô Arduino
Recursos de suporte para carros inteligentes
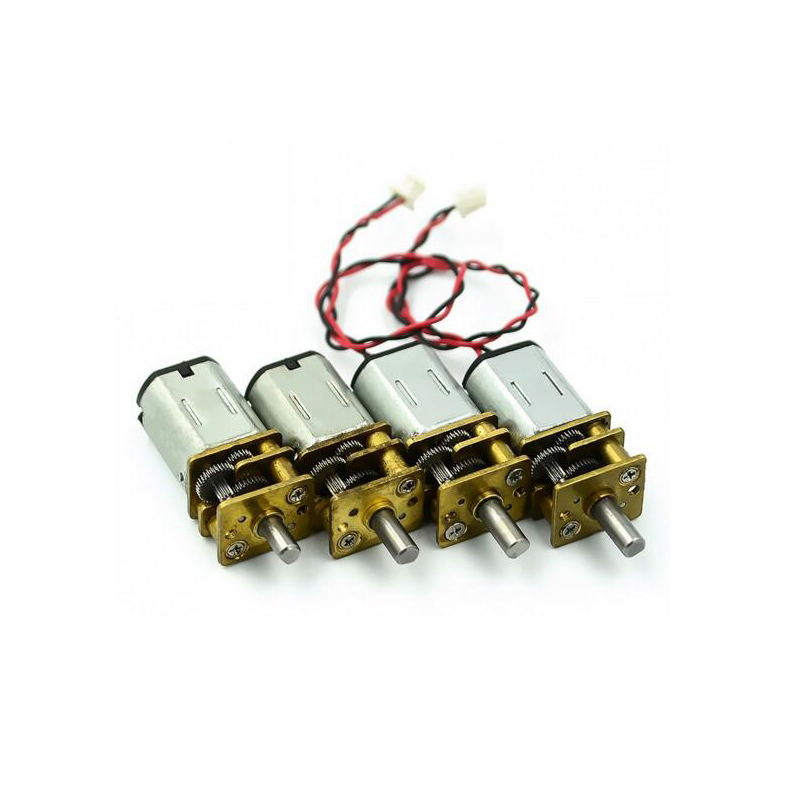
Os sensores do carro inteligente geralmente adotam tubo infravermelho, interruptor de metal, alcance ultrassônico, sensor de aceleração, sensor de bússola, engrenagem de direção, motor DC, controlador L298N, etc. Carro inteligente para educação de robôs Arduino