Getting Started with Arduino Car Kits
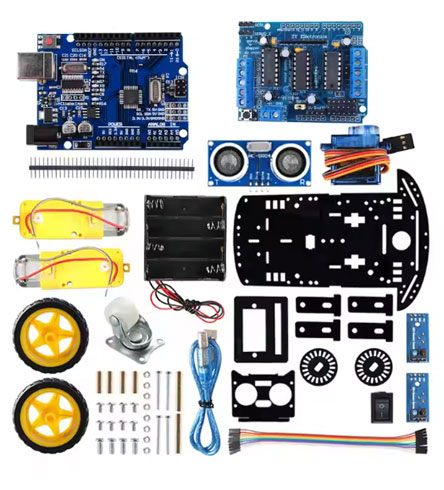
1. Choose the Right Kit: When selecting an Arduino car kit, consider factors such as your skill level, budget, and the type of project you want to build. There are many different kits available on the market, ranging from simple beginner kits to more advanced kits for experienced users.
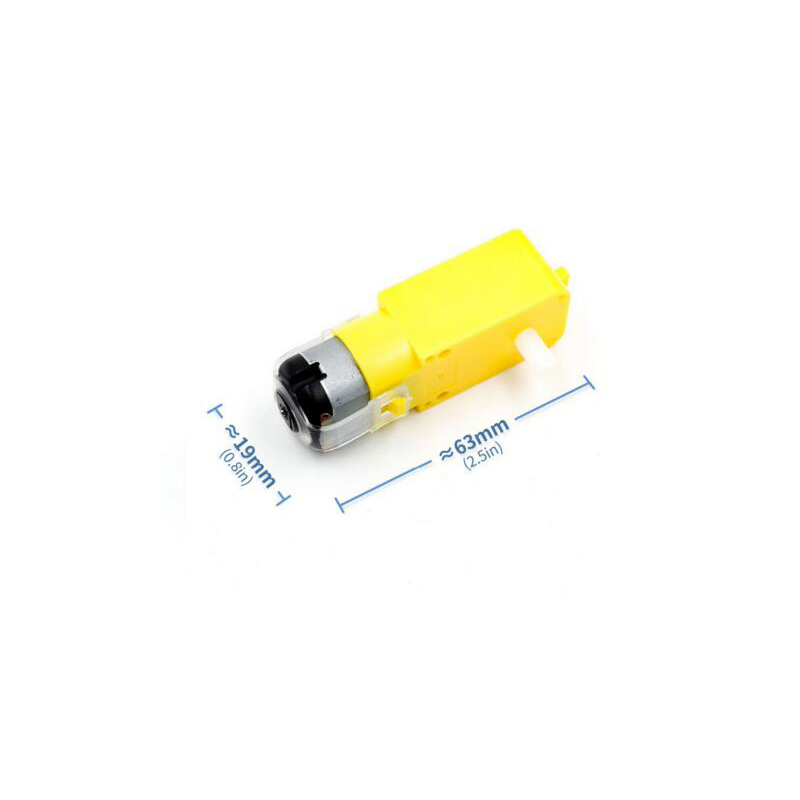
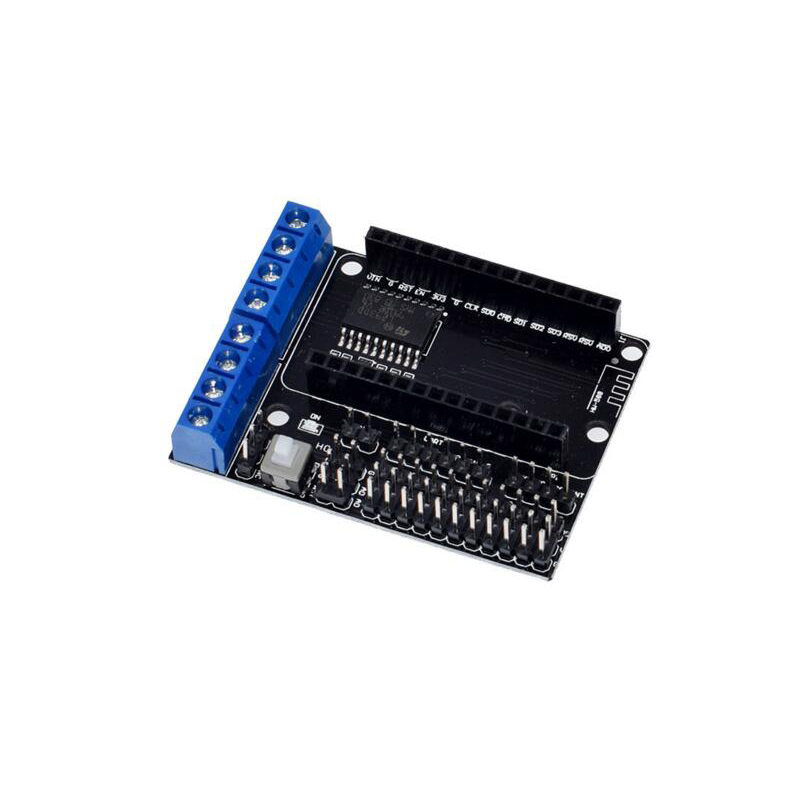
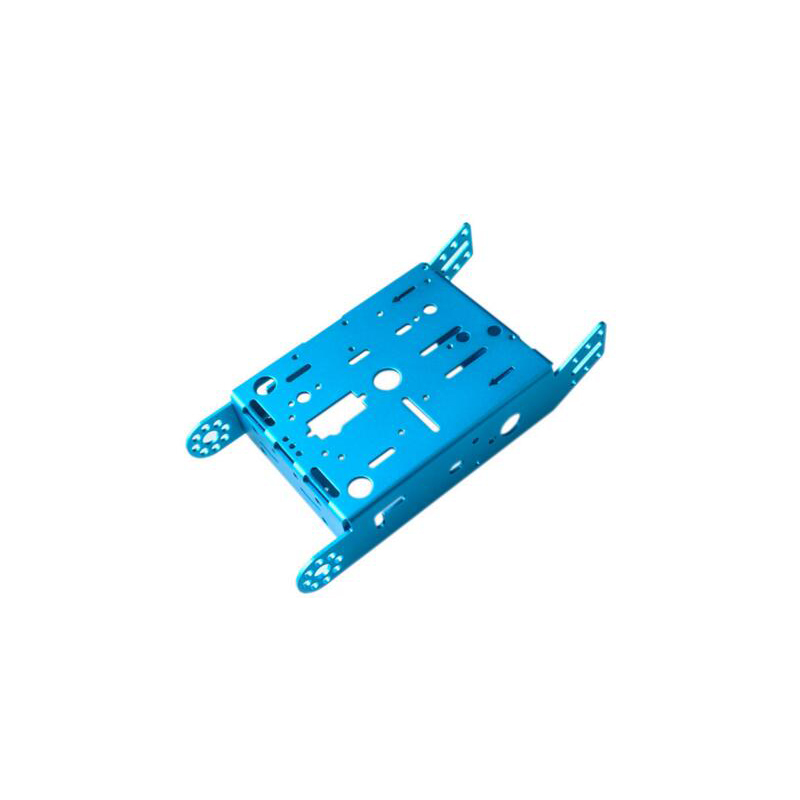
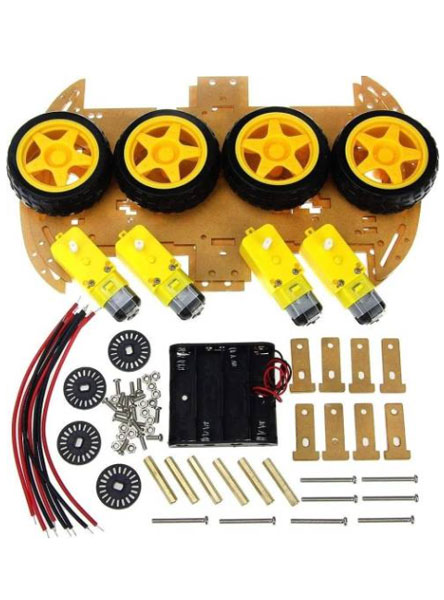
2. Follow the Instructions: Once you have chosen a kit, carefully read through the instructions and familiarize yourself with the components included in the kit. Take your time during the assembly process to ensure that each component is connected correctly and securely.
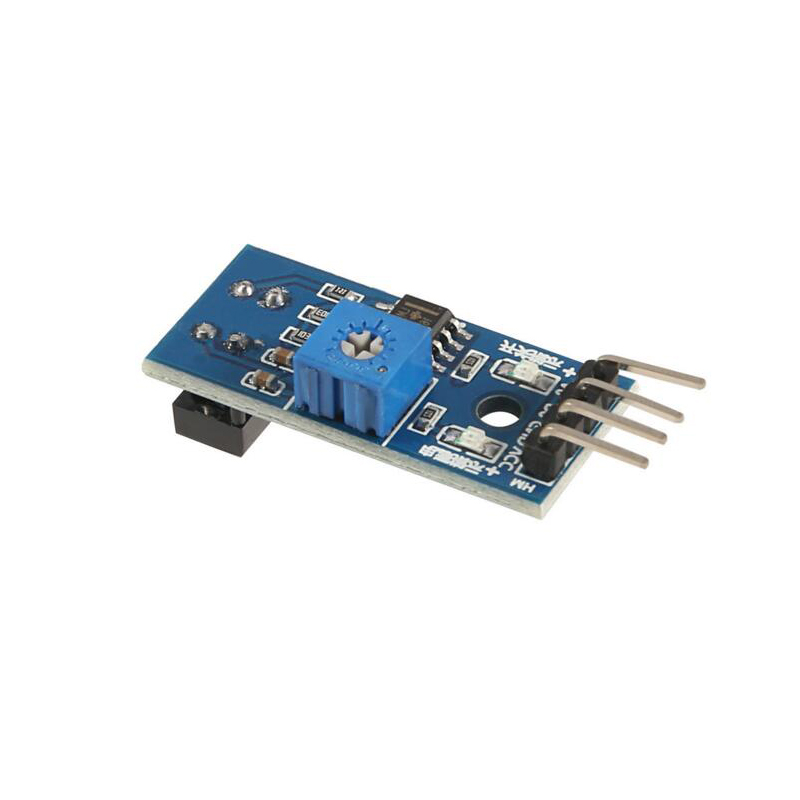
3. Experiment and Learn: Once you have built your Arduino car, take the time to experiment with different programming techniques and sensors to see what your car is capable of. This hands-on approach will help you develop a deeper understanding of how the components work together and how to troubleshoot any issues that may arise.
4. Join a Community: Joining an online forum or community of Arduino enthusiasts can be a great way to connect with others who share your interest in robotics and programming. These communities are a valuable resource for sharing ideas, troubleshooting problems, and getting inspiration for your next project.